

Summary
This is a project I started in Fall 2025 with my school’s NSBE (National Society of Black Engineers) chapter, set to be completed over the course of the school year. The goal of the project is twofold: first, to successfully design and build the hexacopter platform, and second, to integrate a payload with a range of potential applications, such as LiDAR.
Process
Much like designing a rocket, optimizing a drone is no easy feat. It's a problem filled with interdependent variables — every component depends on the details of another, and you end up in a chicken-and-egg scenario. Because of this, we started the project by writing requirements to define our objectives and mission criteria. This ended up helping tremendously with design decisions, allowing us to narrow down the nearly endless combinations of components into something that actually achieved what we were aiming for.
I leaned pretty heavily on my group members for everything electrical, guiding them on the approximate battery class we would need to satisfy our flight time and thrust-to-weight requirements. We figured that aside from the payload, the battery would be the heaviest component, so nailing that down would give us a good estimate for overall weight.
The greatest headache was choosing a motor. Going into it I knew nothing of motor classifications, pricing, properties, or anything. I knew that for a hexacopter each motor and propeller would have to produce a certain amount of thrust, but finding these metrics also proved to be complicated as many manufacturers did not have tables for thrust ranges broken down by propeller size and throttle. I settled on the SunnySky V3508 700kv motors: affordable, reliable, and they had listed thrust ranges that lined up with our predicted weights. Once a motor was chosen we were able to work backwards to select ESCs, and ensure compatibility with the battery, also giving us an estimate of flight time.
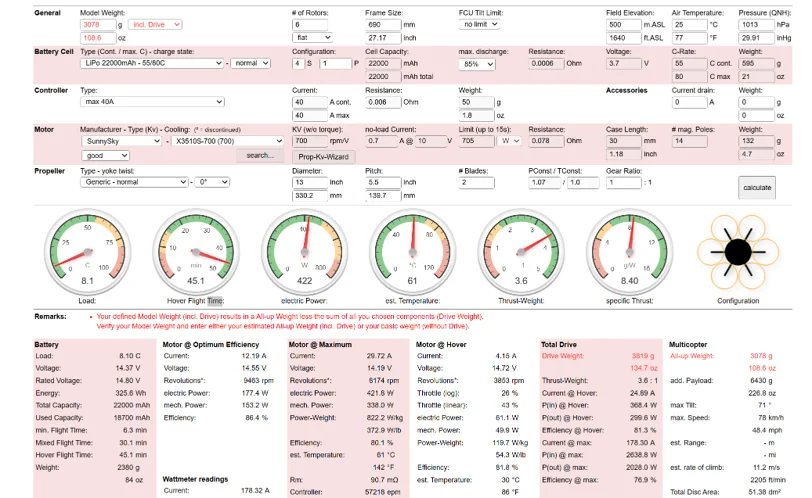
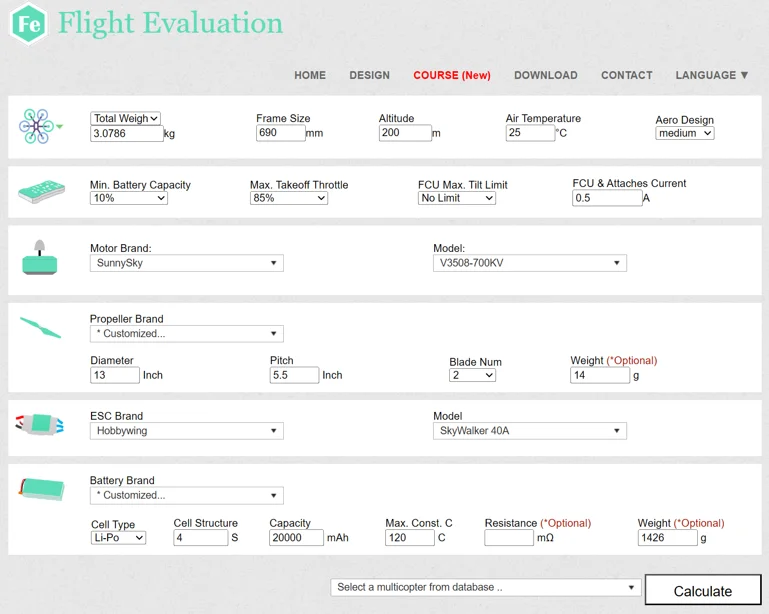
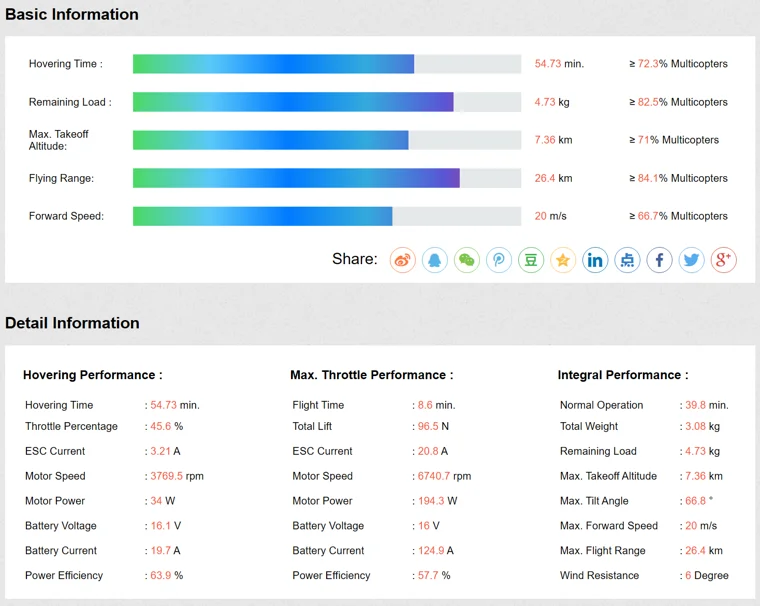
One thing that really helped with confirming our component build were online tools that would calculate TWR, flight time, efficiencies, and potential payload weights given motor, battery, and ESC selection. The two that I used were flyeval.com and xCopter.
Design concluded with the consolidation of our work into a presentation, after which we will move on to build and testing.
Critical Design Review
Bill of Materials
Requirements
Current Status
Awaiting hardware to arrive.